近日,油管“网红”波士顿动力再放大招,在新发布的视频中,旗下仿生机器SpotMini表演了新技巧首秀:十只四足机器狗拉着一辆挂空挡货车前行,仿佛十条狗在一起拉动一辆雪橇车。波士顿动力公司表示,SpotMini即将投入实际应用,预计2019年将量产100台左右的SpotMini机器狗。
波士顿动力之所以成为YouTube网红,是因为这家公司已经多次在油管上发布该公司仿生机器人的视频,如人形机器人 Atlas 完美三连跳,机器狗 SpotMini 在建筑工地自动巡查,以及 SpotMini 大跳放克舞蹈,赚足了眼球,播放量最高超过3000万次。这次发布拉货车的新技巧,再一次让波士顿动力这家网红公司赚足了眼球。
不过我们日常生活中,还很少见到仿生机器人。这类机器人的应用还很不普遍。除了波士顿动力的产品,还有哪些值得关注的机器人?这个行业的应用前景如何?
行业纵览
1)“仿生机器人”是指可以模仿生物的外部形状、运动原理和行为方式,从事生物特点工作的机器人。也就是说,仿生机器人不一定是人形机器人,机器狗、机械鱼、仿真机器鸟等仿照各类生物工作的机器,都可以归到仿生机器人一类。机器人已经是一个通俗的叫法,就像微软小冰这种虚拟的聊天工具也被称为聊天机器人。
按照作业地点的不同,又可以将机器人分为水下仿生机器人,空中仿生机器人和地面仿生机器人。
按照模仿的对象,主要的仿生机器人包括三大类:一是仿人机器人,二是仿生物机器人,如仿狗机器人、仿鱼机器人、仿鸟机器人等。三是生物机器人。生物机器人是一种高度仿真的机器人,如在机器人骨骼的外面包裹一层肌肉组织,让肌肉与一台机器设备结合,去复制手、手臂和生物的身体其他部分的复杂肌肉相互作用,我们可以把美剧西部世界里的机器人看做是高级形态的生物机器人。生物机器人还太遥远,而仿人机器人更常见、更好理解一些。
本次内容我们主要来看一下仿生物机器人。
2)仿生机器人并不是新生事物。
仿生机器人基于仿生学、计算机、机械、自动化控制等多种学科发展而来,到现在为止,已经有几十年历史,经历了四个阶段。
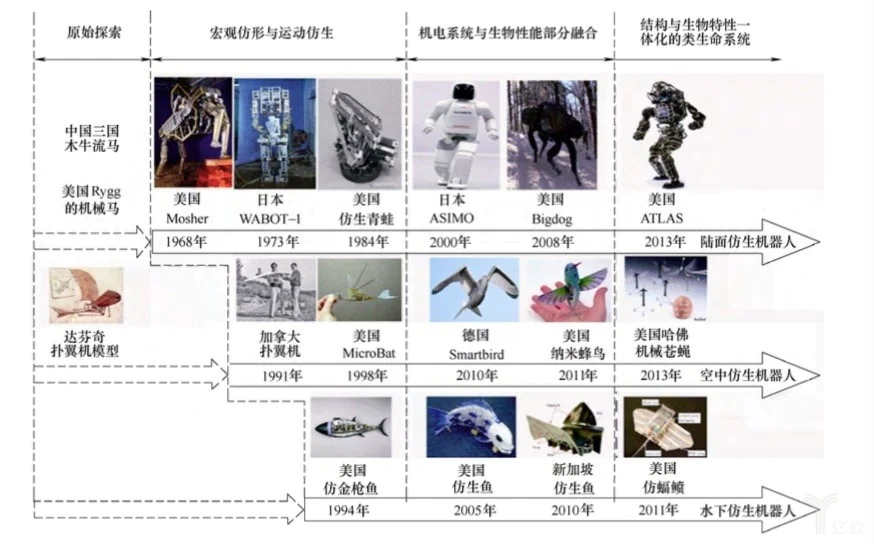
第一阶段是原始探索时期,这一阶段主要是生物原型的原始模仿,如原始的飞行器,模拟鸟类的翅膀扑动,该阶段主要靠人力驱动。
20世纪中后期,仿生机器人进入到第二个阶段,主要是利用机电系统实现诸如行走、跳跃、飞行等生物功能,并实现了一定程度的人为控制。
进入21世纪,随着人类对生物系统功能特征、形成机理认识的不断深入,以及计算机技术的发展,仿生机器人进入了第三个阶段,机电系统开始与生物性能进行部分融合,如传统结构与仿生材料的融合以及仿生驱动的运用。
当前,随着生物机理认识的深入、智能控制技术的发展,仿生机器人正向第四个阶段发展,即结构与生物特性一体化的类生命系统,强调仿生机器人不仅具有生物的形态特征和运动方式,同时具备生物的自我感知、自我控制等性能特性。
3)仿生机器人会运用哪些关键技术?
仿生机器人是一个非常前沿的领域,技术也比较复杂,涉及仿生学、机械构造、智能控制等多方面。关于仿生机器人所运用的一些关键技术,航天科工智能机器人公司李楠博士曾在报告中列出以下几点:
首先是生物机理准确建模和分析。通过对生物机理研究,可以揭示生物自身的功能特性,为仿生机器人的研究提供依据,而研究的关键是如何准确地对生物运动机理进行建模。
第二点是仿生机构和驱动方式。仿生机器人的整体结构应能够近似再现被模仿对象的结构特点,从而更好的模拟生物的运动功能。不过在现有的研究中,无论是运动机构设计还是驱动方式都与生物的形态存在较大差异。
第三点是高性能仿生材料应用技术。常见的生物结构一般都是刚柔混合的,肌肉是柔性的,内部支撑架是刚性的。但在现实中,仿生机器人材料大多采用钢、铝、塑料等常规材料,无论刚度、柔性、韧性以及减阻性与生物自身差距很大,使得仿生机器人性能降低。所以,高性能仿生材料是需要我们重点研究的。
第四点是仿生感知与控制。生物控制系统是仿生机器人研究的重要目标之一,生物对自身协调运动控制的能力是一般的机电控制系统无法比拟的。 目前的仿生机器人对复杂环境的适应能力不足,无法真正模拟生物实现精确的定位和灵活的运动控制。如何设计核心控制模块与网络以完成自适应、群控制、类进化等一系列问题,已经成为仿生机器人研发过程中的首要问题。
也就是说,仿生机器人重点结合了仿生学、材料学、感知控制等多方面技术。
4)一起来看看各种形形色色的仿生机器人吧。
水下仿生机器人,有仿鱼、仿蟹、仿章鱼等多种方向,既有消费级也有工业级产品,消费方向主要是做水下的摄影摄像,工业级产品主要是在海洋救援、海底探测、军事、石油工业等方面。
哈佛大学在2016年也曾研发出一款仿章鱼的全软机器人Octobot,是研究人员结合了嵌入式3D打印技术、注塑成型和软光刻技术制造出来的,其体内的反应装置会将极少量的过氧化氢转化为大量的气体,从而使它们能像气球一样膨胀。研究的目的是想将其使用于公海搜救任务、海洋温度传感和军事监视等任务。

仿章鱼机器人Octobot
MIT在2018年开发出一款水下机器人SoFi,外形与鱼类无异,外部结构全部由3D打印的塑料制成,拥有一个强大的液压执行单元,可以将水从一对内腔泵入和泵出,从而使尾鳍前后移动。研制该款机器人的目的为在产生最小的破坏性的前提下,能够近距离的观察所有的水下生物。

仿鱼机器人SoFi
德国工业控制和自动化公司Festo发布过仿海扁虫机器鱼BionicFinWave,以两片柔软的矽胶代替乌贼肉鳍,透过左右各9个支点协助进行波浪状拍动。公司列举的用处包括深海探测、数据收集等。

国内也有相关的产品研发。水下机器人公司博雅工道开发了一款机器鱼,属于消费级产品,无缆绳,易携带,主要用于水下的拍摄。

博雅工道还发布了智能仿生鲨鱼ROBO-SHARK,采用仿生流体设计,结合其尾鳍式推进方式,配合采用薄膜震动型吸声结构外壳,能够实现水下低噪音,增强环境适应性,应用场景为各种海洋任务的无人化作业,比如海洋科考、水质监测、地貌测绘、海底管道检测、水下打捞、大坝巡检等。
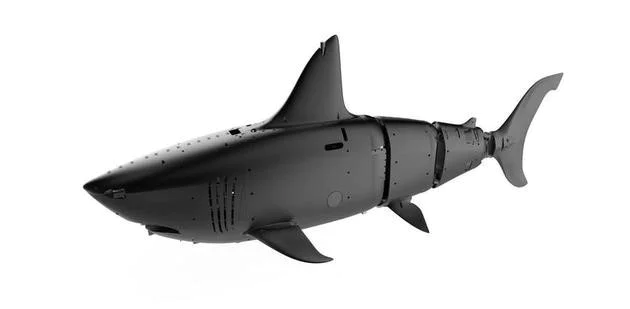
智能仿生鲨鱼ROBO-SHARK
意大利高校的研究人员还曾开发过仿章鱼的软体机器人,可将水吸入体腔内并像喷气式飞机一样在水中移动,还可使用其柔软的触手在不平坦的海底爬行。目前这种机器人概念主要用于制造业,其机械臂非常适合于重复性的、需要精确度的工作。
国内科技公司臻迪科技针对钓鱼场景,开发了仿鱼机器人“小海鳐”,帮助垂钓爱好者实现水下的可视化,增强钓鱼乐趣。这款产品也带动臻迪科技在2017年实现了1.41亿元的营收。

地面仿生机器人
陆地上的应用场景更多,仿地面生物的机器人就更多了,开发的主体基本以创业公司和高校等研究机构为主,目前业界很少有量产的仿生机器人,大多是出于试验的目的,开发某种仿生产品。
我们熟知的波士顿动力,其产品主要是仿狗机器人,早期主要是和军方合作,开发了具备负重能力的机器狗“大狗”,配备各类电子设备,与战士一起上战场,用作侦察监视、火力打击、机动突击。

波士顿动力仿狗机器人
但目前该产品难以解决两个顽疾:机器狗运行起来,噪音很大,容易在战场上暴露目标,而且作为高精设备,在战场上出问题,维修困难。综合起来,非常不实用。
后来波士顿动力转向民用方向,发布过不少产品视频,如可以背负 181 公斤的有效负载进行自由行走和奔跑的LS3机器人、在跑步机上创造了 48 公里 / 小时的机器人奔跑时速记录并可跨越障碍物的野猫机器人。不过与之前的“大狗”一样,由于机电系统等方面的原因,噪音问题难以解决,影响了应用前景。
2017年11月,波士顿动力展示了更小巧轻快的四足机器人Spot Mini,高度约0.84米,采用电池能源提供动力,驱动液压系统,液压系统再控制每段肢体的动作,实现躯体的灵活运动。Spot Mini在满电状态下可运行约 90 分钟。Spot Mini能力不断强化后,就有了最近的10只Spot Mini拉动货车的“壮举”。
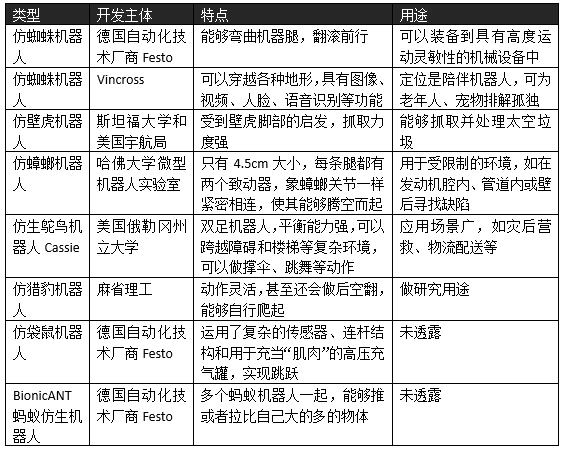
波士顿动力的产品仿狗,仿猫,算是比较常见的产品路径。业界有很多奇形怪状的仿生机器人探索,如德国自动化技术厂商Festo就开发过多款仿生机器人。
空中仿生机器人
空中场景相对有限,空中仿生机器人数量也就不算多。在此列举几例。
荷兰公司Clear Flight Solutions曾制造出两种鸟形机器人(机器老鹰和机器游隼),机器游隼身长58cm,翅展长度120cm,机器老鹰则比机器游隼大了一倍。这两款机器人在空中的飞行速度可达80km/h, 需要工作人员手动遥控操作。我们知道,鸟类对飞机起飞和降落都构成了很大的威胁。这两款机器人试图用在机场,可以在不借助潜在有害网状物或噪音发射装置的情况下有效地吓跑较小的鸟类。
英国国防部从蜻蜓身上找到灵感,制造了一款仿蜻蜓的微型无人机Dragon Fly,它体型小,是战场上监视敌情的好工具。更重要的是,无人机一般噪音很大,很容易在战场上被发现。英国国防部这款仿蜻蜓机器人利用蜻蜓扇翅的原理,去减小叶片转动时的噪音。
上面提到过的曾开发过仿蜘蛛机器人的德国自动化技术厂商Festo,还曾开发过仿蝴蝶机器人,蝴蝶翅膀十分轻薄,头部一有块电路板,而且仅有指头那么大,双翼配备了特殊的微型电机,翅膀每秒摆动1-2次,速度可达2.5米/秒。仿生蝴蝶还配备有惯性测量装置,加速度计,陀螺仪,指南针以及两个90毫安时锂电池,一次充电15分钟可飞行3-4分钟,身体重量仅为32g。

5)仿生机器人的商业化程度还很低。
仿生机器人看起来很炫酷,但商业化进展并不顺利。波士顿动力是这个领域的明星公司,最初是在谷歌旗下,但因为需要长时间的投入,且商业化进展缓慢,谷歌后来将波士顿动力卖给了软银。明星公司尚且命运曲折,其他公司就更难了。
另外从上面的资料也可以看到,德国自动化公司Festo也是一家神奇的公司,开发过陆海空环境下的多款仿生机器人,如袋鼠机器人、海鸥机器人、蜻蜓机器人、蚂蚁机器人、蝴蝶机器人等。这些产品开发后在各种博览会展览,但并没有什么实际用途。该公司的说法是,在仿生领域的深入研究,可以为其在汽车与工业自动化领域的研究提供支持。
仿生机器人的应用可以分为两个方面,即军用和民用,一般情况下,往往是先在军事领域进行开发,做一些应用,之后是转民用。波士顿动力的发展就是如此。在民用领域,又可以分为消费级民用产品和工业级民用产品。现在消费级民用产品较少,主要是水下仿生机器人的摄影录像功能、陆地仿生机器人的陪伴与娱乐功能、空中仿生机器人的航拍功能等。
准备用于B端的仿生机器人是主流。可以从前面的案例看到,在各行各业、在水上陆地空中多种场景下,几乎都有仿生机器人的使用前景,不过也只是前景,现在真正商业落地的仿生机器人应用还很少。我们看到这么多仿生机器人案例,大多数停留在实验室阶段,大学等科研院所做前沿技术研究的时候开发了这些产品,在实际环境中的应用非常少,至于工程化乃至量产那可能是几十年后的事情了。
哪怕是业界明星,商业化也并未展开。波士顿动力曾表示要做2019年底量产1000台机器狗SpotMini,但业界对其量产能力与应用前景并不乐观。现在的波士顿动力,正在试图向平台化方向发展,本身做通用用途的平台,让第三方伙伴、客户在平台通用产品基础上做应用开发,以符合定制化需求。如在机器狗身上按照购物篮,使之充当家庭购物助理的角色。
行业解析
大多数机器人产品在商业化中存在的阻碍就是:技术能力还不完善,以至于不能满足实际应用场景中的要求;研发成本高,导致价格高企,性价比差,不能被潜在客户接受。仿生机器人显然也是这样的问题。
以波士顿动力的机器狗未来,在技术能力上,其产品只是适应了波士顿动力的实验环境,再拿到各种复杂环境中,比如机器狗可以爬楼梯,但当楼梯上有障碍物,或者楼梯台阶较高,与实验环境差别很大时,这些机器狗可能并不能越过。此外,噪音大、电力续航能力不足等毛病,现在也比较突出。
在应用场景上,其短期的应用规划包括娱乐功能、应急响应、安保,稍长远些的规划是仓储物流、包裹配送,长期应用场景则有工程建设、仓库服务。但这些领域对仿生机器人的需求还远未到释放期。以娱乐为例,机器狗跳支舞,人初看觉得新鲜,却很难引起购买充动。再以波士顿动力寄以厚望的物流配送为例,就算这个机器狗可以送货,可以在仓库拣货,但用人来操作成本更低,也更熟练。一个机器狗可能几万美元,买来做配送员,经济上不划算。
仿生机器人发展到现在,一个突出的特点是研究导向,为研究仿生而研究,为实现生物的功能而研究,还没有到应用导向的阶段,从某种意义上说,就是为了研究,就是为了炫酷,至于应用,还没来得及去细想。而我们看AI的应用落地可以明显感觉到一点,就是不能为了AI而研究AI,合理的产业发展一定是应用导向,去深入到行业去发掘场景里的需求痛点与落地难点,再去做针对性的产品开发。仿生机器人未来的发展应该也会经历这一步。
当然,现在的仿生机器人研究并非无意义,这种前瞻性的研究往往是未来大规模应用的前提。而且这种研究不仅会促进仿生机器人本身的发展,也是AI技术、控制技术、传感器技术、材料学等得以进步的重要途径。
评论